一、引言
空气压缩机是一种通用的工程机械,适用范围大,用途广。特别是小型移动式空气压缩机,是室内室外装饰装修、喷漆、机械维修等工程必不可少的机械设备。现有技术中的空气压缩机技术已经比较成熟,但在某些情况下,仍然显得不是太尽如人意。例如:在施工场地较大,空气压缩机使用位置较多时,则需要多台空气压缩机,或多根气管长距离送气;某些施工环境,空气压缩机可能只使用一两次,但也需把整台空气压缩机拖至施工现场,给施工带来诸多不便。
二、整机的结构组成和使用方法
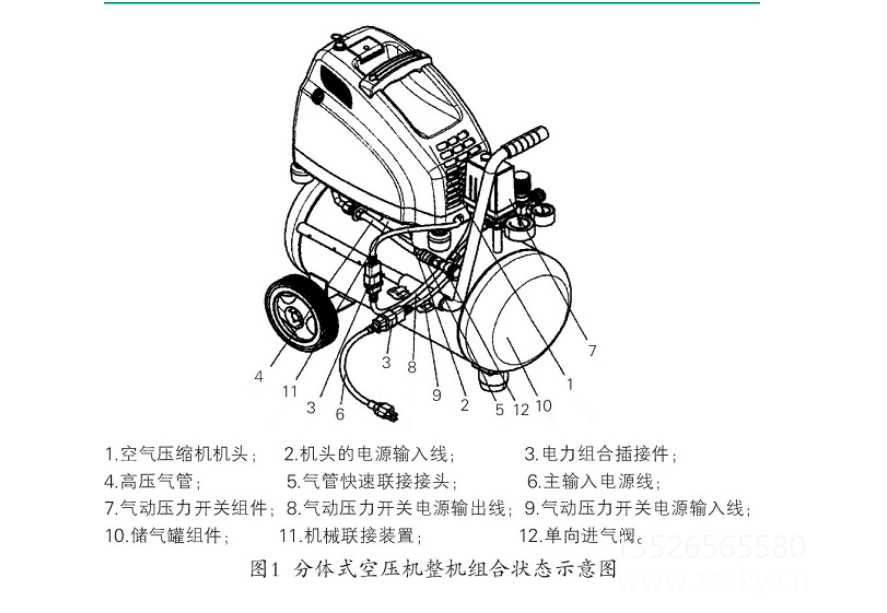
本设计的技术方案如下:空气压缩机机头和储气罐之间使用机械联接装置联接,能随意分离单独使用或联接后整体使用;空气压缩机机头和储气罐之间的高压气管使用快速联接接头联接;空气压缩机机头的出气口位置带有压力安全阀;储气罐上带有气动压力开关,气动压力开关和电源输入线各自都采用的是电力组合插件进行的联接。当空气压缩机机头和储气罐分离后,机头的输入电源线与主电源的输入线之间,便也可采用电力组合插件进行联接供电。
这种结构设计操作方便、便于携带、拆分灵活、适用范围广,尤其适合机械维修使用。空气压缩机机头和储气罐联接在一起的状态,如图1所示。
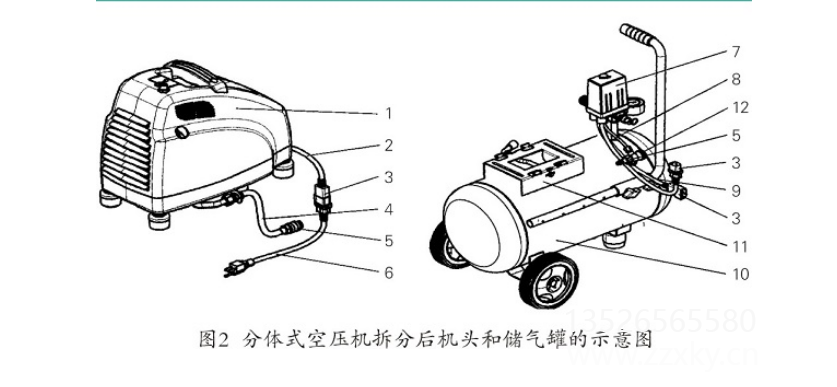
图2中的两个视图,展示的就是空气压缩机被拆分后,空气压缩机机头和储气罐各自单独的状态。空气压缩机机头1被分开单独使用时:机头的电源输入线2和主输入电源线6进行组合插接,实现电源的联通。气管快速联接接头5的母插头作为了空气压缩机机头的气体输出接头使用。对于被拆分出来的储气罐组件10,就不用任何电力的输入了。在电源不方便的场所,用户便可以直接使用储气罐内部的高压气体。这个气体通过气动压力开关组件7上的出气阀实现输出供气,同时还可通过压力表读出所剩气体压力的数值。等高压气体用完后,便可拖回去和压缩机机头联接在一起,再次进行充气了。
在这个拆分过程中,气路和电路都采用的是现成的标准插接组合件,只有机械联接装置11是自主研发设计的纯核心专利技术。下面会给大家重点介绍一下这个联接装置。
三、机械联接机构的构成和动作原理
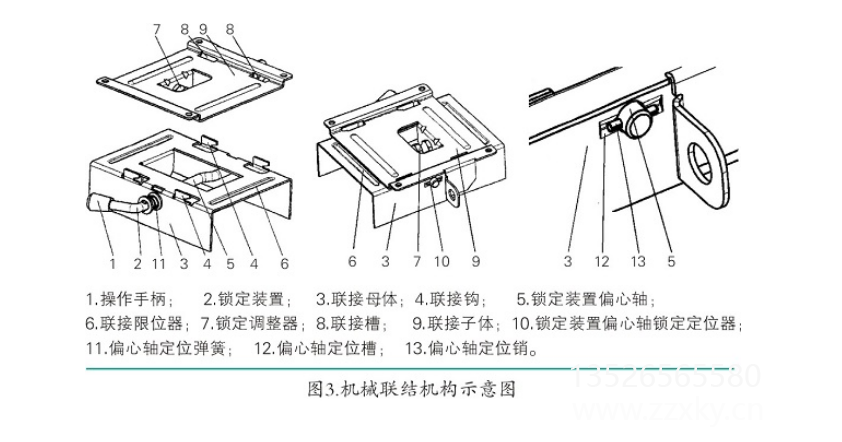
分体式空气压缩机的最关键的功能性部件是“箱架”,这个零件采用了一种特殊的机械联结机构,这个机构采用的是偏心轴驱动联接钩与联接槽咬合联接的联接方法。具体的组成部件以及相互位置关系,如图3所示。
在联接母体3上设置一组联接钩4,在联接子体9上设置一组联接槽8,在设置位置上联接钩4与联接槽8要相互对应吻合。在联接母体3上设置一套联接锁定装置2,联接锁定装置2由联接操作手柄1、联接锁定装置偏心轴5、联接锁定装置偏心轴锁定定位器10构成。联接操作手柄1、联接锁定装置偏心轴5和联接锁定装置偏心轴锁定定位器10是一个可以转动并可轴向运动的整体。在联接体上设置联接限位器6,其作用是方便联接体联接时对合,并限制联接体联接时横向移位。联接锁定装置偏心轴锁定定位器10由偏心轴定位槽12、偏心轴定位销13和偏心轴定位弹簧11构成。偏心轴定位销13在偏心轴定位弹簧11的作用下保持在偏心轴定位槽12内,使联接锁定装置偏心轴5不能转动。从而整套的机械联接机构被锁定装置偏心轴锁定定位器10锁定。联接锁定装置2的锁定位置,可由锁定调整器7的调整螺丝,调整与联接锁定装置偏心轴5之间的距离来实现。
联接时,首先将联接操作手柄1向内压,使偏心轴定位销13脱离偏心轴定位槽12的限制,并向上转动约90度。将联接母体3、联接子体9按联接限位器6的位置对合后,将联接操作手柄1反向转动,联接锁定装置偏心轴5推动联接子体9横向移动,联接钩4与联接槽8联接咬合,至联接锁定装置偏心轴锁定定位器10定位后,完成联接。
分离时,将联接操作手柄1向内压,使偏心轴定位销13脱离偏心轴定位槽12的限制,并向上转动约90度,联接子体9横向移动,使联接钩4与联接槽8脱离,完成分离。
通过以上联接和分离的过程,大家不难看出,“偏心轴”在这两个动作的过程中既起到了分合驱动的作用,又起到了锁紧固定的作用。在常见的机械结构中,也有好多是采用偏心机构来实现定位、加紧的。所以,对于分体式空气压缩机而言,这种机械联接装置属于对现有机械结构和机械原理的一种新应用。当然,主要还是因为这种机械联结机构具有操作简单、分合快捷、联接牢固、可靠的优点。
四、结语:
通过上文所述,想必大家对于这款可分离亦可联接的移动式空气压缩机的整体机构构成有了一定的了解了。空气压缩机在分离和联接的动作过程中,使用的都是我们常见的电气接插件、常用的机械结构和机械原理。通过简单的相互配合,便实现了快捷拆分和联接的效果,满足了现有不同场合使用空气压缩机的需求。

 淘宝1
淘宝1